

前言:在昨天晚上成功把bode100的測試數據導入到matlab中進行閉環控制器的設計后,今天我實際測試了由這種設計方法得到的閉環控制參數的真實性能,并取得了不錯的效果,方法可見:《提取環路測試數據進行系統閉環控制參數設計》。
從上次找大佬借儀器測試基于time shift control方法的數字電流模式LLC的環路數據后,因為測試出來的穿越頻率僅為220Hz,這么低的低頻增益引發我的一些思考,我在那篇文章里面寫過,我懷疑是實際c2000環境中的調制器(頻率振蕩器)的增益不同,引起了被控對象和開環增益較低的問題,具體內容可見:《基于TSC電流模式諧振變換器的數字化實現與環路測試P5》。
所以在PLECS環境中借由C2000 PWM模塊來模擬C2000的現實中的實現并測試從周期寄存器上的頻率擾動到輸出電壓的頻率響應。主要的考慮是需要寫入好幾百的數字到周期寄存器用于改變開關頻率,不同于在simlpis環境和現實中模擬控制器使用mA級的電流來產生百KHZ的PWM,簡而言之就是兩者振蕩器的控制到頻率輸出的增益有很大的區別。

(PLECS環境中使用C2000PWM模塊模擬TSC控制)
頻率響應測試:
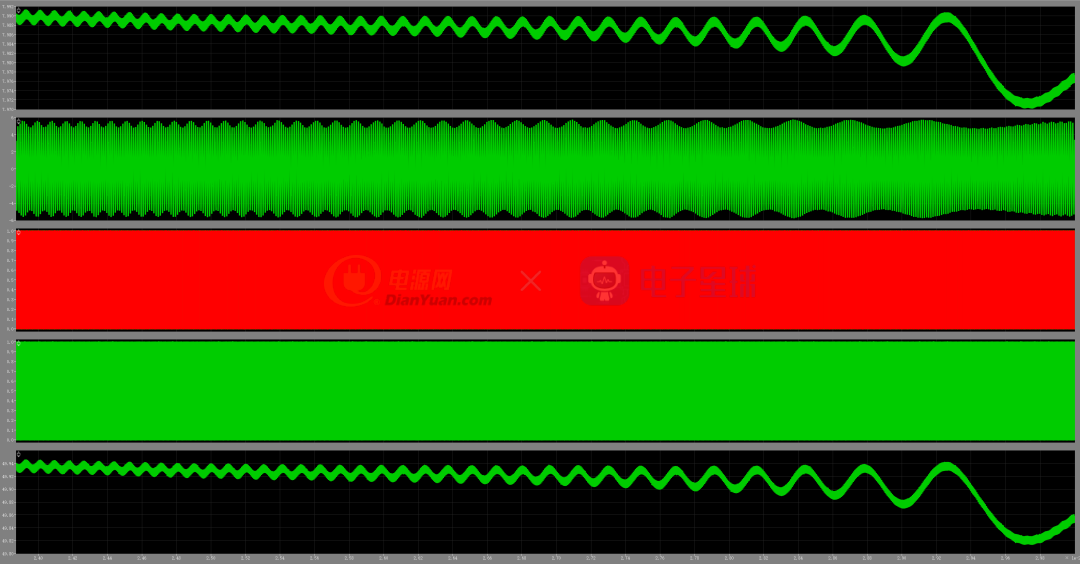
(掃描控制到輸出電壓的頻率響應)

(控制到輸出電壓的頻率響應)
可見PLECS環境中仿真的數據與實際測試的開環增益減去閉環控制器的影響后的被控對象相比,其增益和相位差異并不大,這也反證了使用環路分析儀測試的數據的正確性。
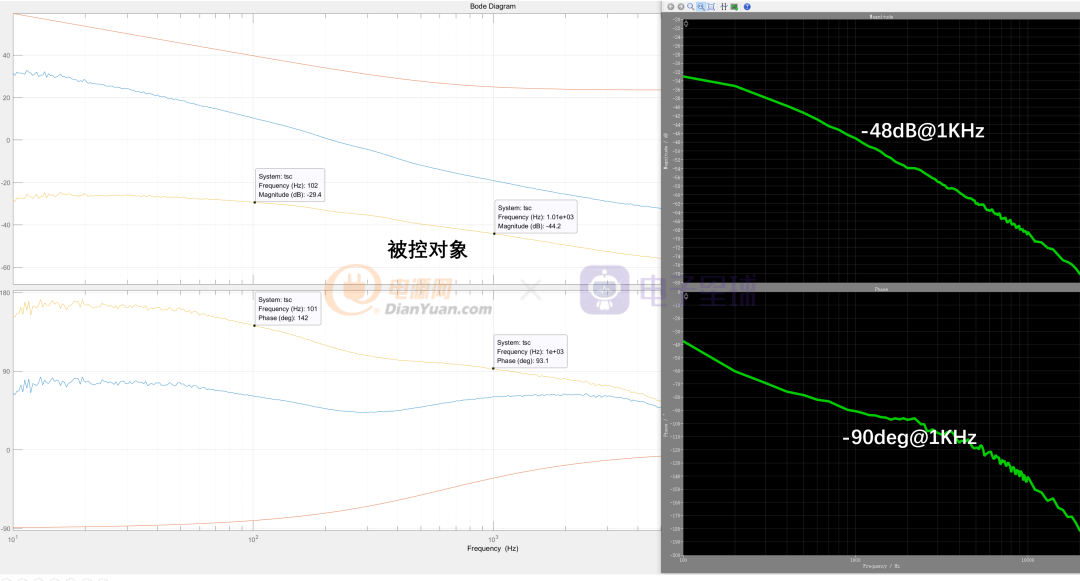
(對比分析環路掃描數據)
至此,我基本可以認為在這個工作點(G=1.0,48V/400W)上,基于TSC方法的數字電流模式控制LLC的被控對象是準確的,然后設計好的閉環控制器的參數為:kp = 200.0; ti = 4e-4; fc = 5500; 控制器的傳遞函數為:pifs = kp*(1 + 1/(ti*s))*(2*pi*fc/(s + 2*pi*fc)); 是PI控制器串聯一個在高頻的低通濾波器,用于模擬在模擬控制上常用的type2的實現,其bode可見:

(PIF閉環控制器)
在這組閉環控制參數與系統被控對象的開環傳遞函數為:Fc = 1.3KHz,PM = 60deg。

(系統開環增益)
把這組參數寫入控制程序中,并進行動態負載測試,(G = 1.0, 48V/40W~400W)測試。(電子負載比較差,不能主動設置電流斜率)。測試波形見下圖,其中加載跌落為0.733V,按百分比為1.52%,調節時間1.25ms左右。拋載電壓上沖0.408V,按百分比為0.85%,調節時間6ms左右。
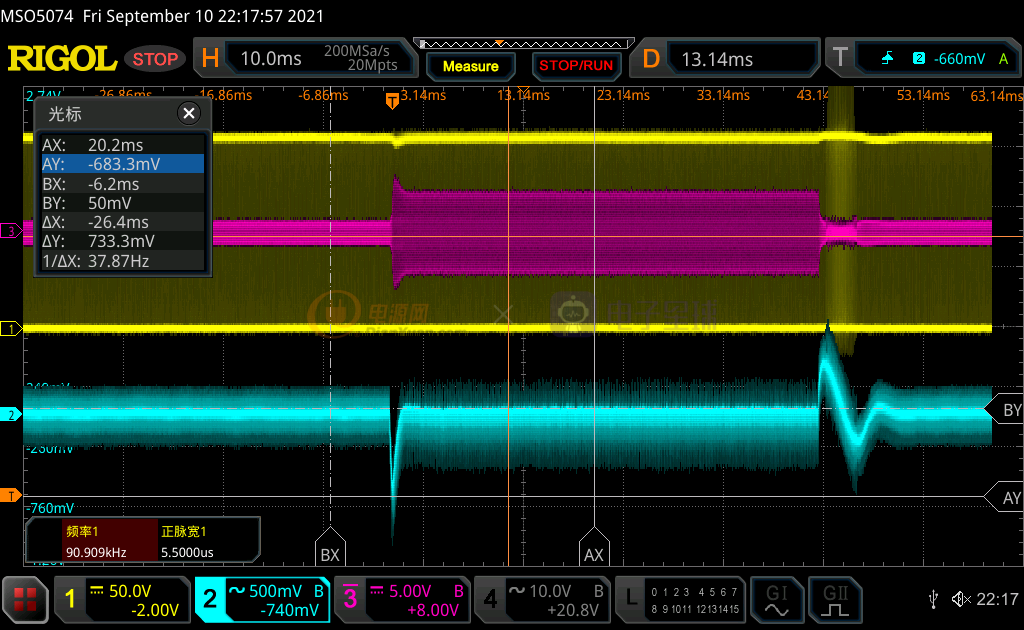
(動態負載測試)

(動態負載:加載)

(動態負載:減載)
小結:經過一段時間的思考,實現了將環路測試數據導入matlab分析的方法,并借由這種方法得到被控對象后進行了準確的閉環控制器的參數設計。然后引入控制器參數實際測試了系統的動態性能,檢驗了整體設計思路的正確性。
感謝觀看,感謝支持,如果有錯誤懇請幫忙指出,謝謝。