

前言:周末找大佬借了一臺BODE100頻率響應分析儀使用,對基于TSC電流模式諧振變換器的loop gain進行了測試,我以為這個控制實現最低也應該是K級別的穿越頻率,但是實際測試起來發現僅220Hz//PM45deg。可見下圖所示,這個引起了我的一些思考,是控制器的參數設置不合理嗎?

測試環境:


目前在DSP中配置為80KHz的ADC采樣,采樣完畢后進入EOC中斷程序,進行閉環控制。閉環控制僅由一個PI來實現,PI的輸出直接給到PWM寄存器作為TSC的控制對象TD來做控制變量的更新。從套路上來看基本是正確的,沒什么大問題的,但是測試的loop gain確實非常低,但是我把閉環控制器PI的的傳遞函數和BODE100測試的數字放在一起進行對比后發現,TSC的功率級的傳遞函數模型,確實是一階的模式,因為增益曲線上沒有看到二階模型存在的增益尖峰,這也是符合在simlpis中的分析結果,已經諸多論文和文獻中的反復闡明。
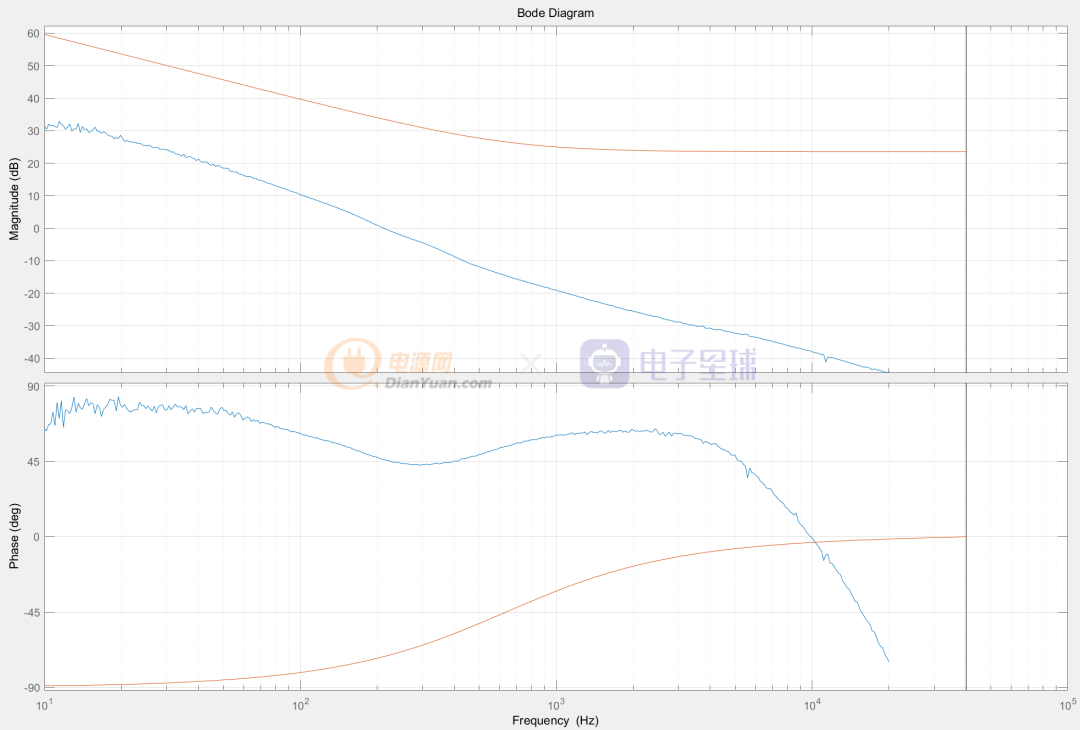
上圖中,藍色為直接測試的loop gain,可當中數字控制的電流型LLC包含反饋的開環傳遞函數,黃色為閉環控制器所使用的PI控制器。經過對比可以看到loop gain的相位在低頻起點是從90deg開始,然后在300Hz附近因為PI控制器的零點把相位提升了起來,所以可看到相位的提升。從loop gain的增益曲線來看,功率級的被控對象的模型在低頻處增益極低,考慮到PI提升的低頻增益,它應該是-30dB。所以如果要繼續提升增益可以直接加大PI控制器的增益,來把Loopgain的穿越頻率直接往高頻移動,這是最簡單粗暴的調節方法。 但是仔細考慮后也想到了一個關鍵問題,在ST提出TSC的這篇論文中提到了TSC的振蕩器的調制增益的計算方法,但是這里是基于模擬的實現。如果換算到數字控制中,因為使用PWM周期計數器的周期達到700個點,所以計算Gmod的話,這個是一個非常非常小的值。它主要表示了閉環控制器輸出的PWM周期點數對功率級上開關頻率的影響能力。下圖中的公式不方便直接替換到數字中計算Gmod,但是考慮DFC的LLC中數字控制的調制增益的計算:1000個PWM計數器點對應100KHZ,則可計算GMod = 1e3/100e3 = 0.01,那么在設計DFC環路時就需要考慮頻率調節器的增益對整個loop gain的影響。因此,我可以基于上訴分析與推測,數字電流模式TSC在低頻處掃描到這么的增益,很大可能是因為Gmod的增益很低,這兩個乘進去后就看到這個低頻處低增益的效果,不過怎么說,頻率控制系統建模應該和PWM控制模式一樣考慮到調節器的增益和其物理意義。
閉環調節器的參數設計: 考慮到220Hz的穿越頻率確實低的嚇人,所以應該設計新的閉環控制器參數來把系統的動態響應提升,我初步預計應該要提升到2KHz左右。根據掃描數據可知,loop gain 在2KHz是-25.6db減去PI調節器提供的23.9dB,為-49.5dB,則新的閉環控制器需要在2KHz點提升49.5dB增益。另外相位提升為:63deg - 72deg = -9deg,若考慮到45deg的PM,則相位提升需要55deg。因此上面就得到了閉環控制器的設計基礎,考慮到PI控制器的手段不夠靈活,這里我后面會使用2P2Z來做,具體設計細節將會在后面的內容中繼續展開,下次再聊,感謝觀看,謝謝支持。關于電流型模式LLC在數字控制系統中的實現內容:
關于本人:我是楊帥,目前從事逆變器儲能行業,專注在雙向AC/DC變換器領域,對雙向DC/DC的研究較多。數年來一直從事電力電子仿真技術研究與應用推廣,致力于實現讓天下沒有難搞的電源而努力。