

任務(wù)間的同步為什么要用事件組,而不用全局變量呢?
在裸機(jī)開發(fā)當(dāng)中,一般都是將任務(wù)用函數(shù)的形式進(jìn)行分配,用全局變量進(jìn)行同步再爽不過,其實(shí)主要存在兩個(gè)原因,第一就是沒有系統(tǒng)的調(diào)度,一切都在后臺(tái)的超級(jí)循環(huán)中,通過全局變量進(jìn)行選擇查詢的方式,進(jìn)行函數(shù)執(zhí)行順序的同步。
冒天下之大不韙:其實(shí)在有RTOS的系統(tǒng)中,你也可以通過全局變量進(jìn)行任務(wù)間的同步,這么干的人可不止我一個(gè)。其實(shí)有好多人用RTOS并不是特別熟悉,任務(wù)創(chuàng)建那一套一上,基本上就是靠全局變量進(jìn)行同步,他用的最多的關(guān)于RTOS的API,可能也就是delay了,這么干行不行,當(dāng)然行,但是說實(shí)話有點(diǎn)大材小用,你都上了RTOS了,何不用系統(tǒng)自帶的任務(wù)同步機(jī)制?——唯一的理由可能是這玩意兒學(xué)起來真有點(diǎn)費(fèi)勁。
當(dāng)然你這么用的壞處也顯而易見:RTOS最核心的任務(wù)調(diào)度機(jī)制已經(jīng)被你廢了一大半了。
事件組本質(zhì)上來講:就是全局變量!!!(為啥沒人說這句實(shí)話)
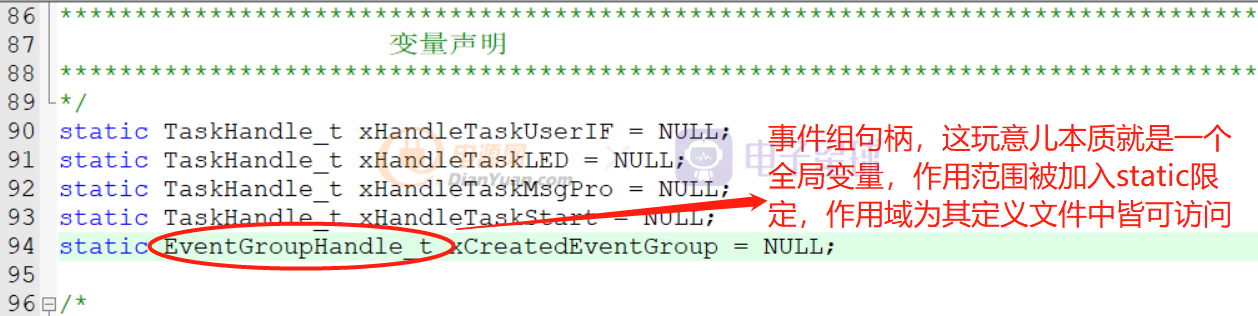
雖然他是一個(gè)全局變量,但是他需要使用FreeRTOS提供的相關(guān)API進(jìn)行訪問,為啥子要這樣干, 就是為了讓RTOS的調(diào)度器知道,每個(gè)任務(wù)與事件組之間的依賴關(guān)系,通過事件組的設(shè)定的不同進(jìn)行任務(wù)狀態(tài)的劃分定義,他才能真正起到調(diào)度的作用。
說白了,調(diào)度器不光要負(fù)責(zé)根據(jù)任務(wù)的狀態(tài)以及優(yōu)先級(jí)完成調(diào)度工作,他還要給每個(gè)任務(wù)去定義任務(wù)當(dāng)前的狀態(tài)是什么。
事件組則更好理解了,事件組 = 全局變量 + RTOS的API操作。目的有兩個(gè):
1.讓調(diào)度器清楚地知道事件組的狀態(tài)。
2.完成事件組的訪問及設(shè)定功能。
希望扯到這里,你能對(duì)FreeRTOS為啥要用事件組這種方式,而不是用全局變量進(jìn)行任務(wù)同步有個(gè)清醒的認(rèn)識(shí),同時(shí)希望你明白,事件組的本質(zhì)就是全局變量。
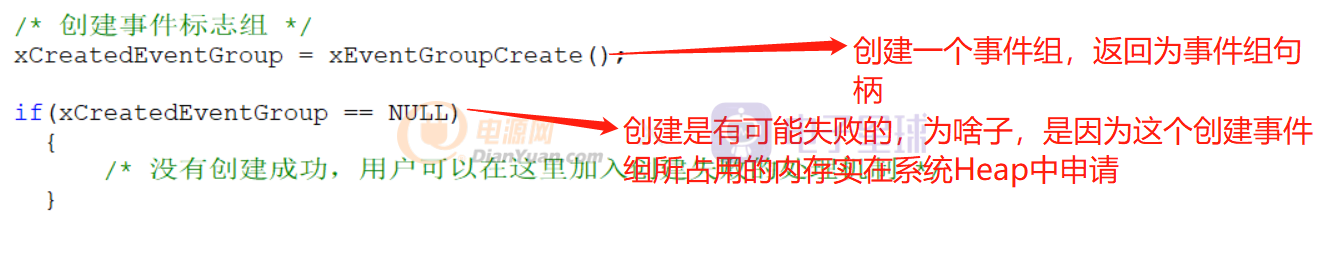
創(chuàng)建一個(gè)事件組:
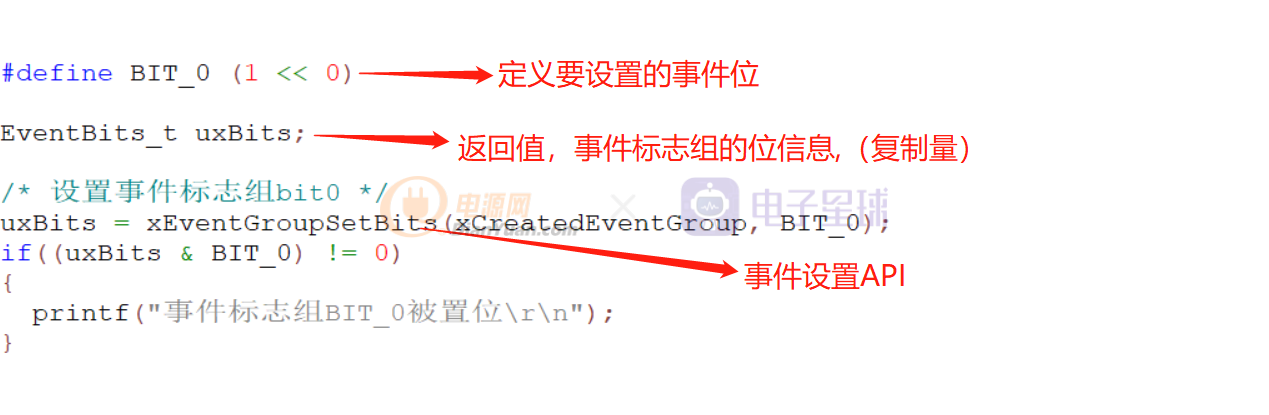
設(shè)置一個(gè)事件組標(biāo)志:
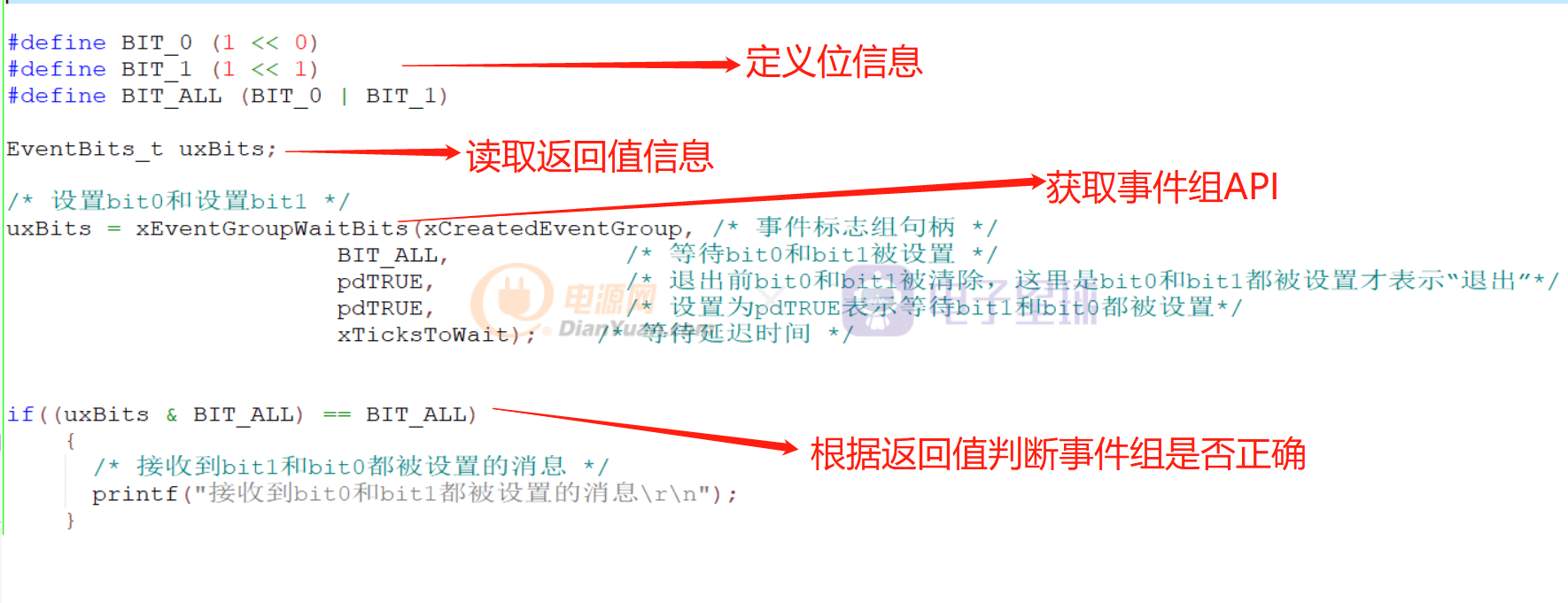
獲取事件組的標(biāo)志信息:
備注:以上皆為任務(wù)間同步的事件組應(yīng)用,中斷服務(wù)例程與任務(wù)間通過事件組同步的API以及應(yīng)用方式稍有不同。