鑒于“西門子仿真S7-PLCSIM Advanced V3.0與RobotStudio 6.0 的Socket通訊”,KUKA的Ethernet KRL也是基于TCP/IP的通訊,所以就進行了一下小測試,中間還是耗費了一點時間的,主要是虛擬機和主機的通訊問題,還好結果是完美的。接下來一起來看看效果吧。
一、什么是KUKA Ethernet KRL ?
EhternetKRL是KUKA提供的一個以太網通信功能的可選軟件包,支持TCP/IP和UDP/IP協議.
1-通過EKI(Ethernet KRL Interface),可以將KUKA機器人配置為服務器或者客戶端,與外圍設備(相機、上位機,PLC,三維掃描儀等)進行以太網通訊
2-外部系統通過EKI交換數據,機器人系統接收外部發送來的XML配置文件,進行處理以后,將信息通過XML形式再發送給外部設備,從而實現穩定高效的數據通信。3-通訊數據默認以TCP/IP協議傳輸,從而保證了數據的完整高效。也可以使用UDP/IP協議,因為UDP/IP協議無法保證識別數據丟失(俗稱丟包),所以庫卡官方并不推薦使用UDP協議。4-在一些對數據包完整性不敏感的特殊應用場合,因為UDP協議的響應速度等特性,UDP同樣得到了廣泛的應用(例如,通過UDP協議,機器人在運動過程中不斷將自身位置信息發送給上位機系統,并向三維掃描儀發送同步信號,這樣,上位機系統就可以擬合出三維掃描儀檢測到的工件模型,為三維表面檢測提供了一種可行的方案)。
二、準備的軟件(我使用的版本)
- TIA Portal V16
- S7-PLCSIM Advaced V3.0
- KUKA Officelite8.3、EthernetKRL選項包
- SocketTool(用于測試)
三、KUKA Officelite運行EthernetKRL
請各位參考,安德魯機器人微信公眾號里面的文章“庫卡機器人之Officelite運行EthernetKRL”,也就是傳說中的“老王”的個人公眾號,里面有詳細的介紹和操作。
四、TIA Portal V16中的編程設置
可以參照“西門子仿真的PLC與RobotStudio 6.0 的仿真通訊”。
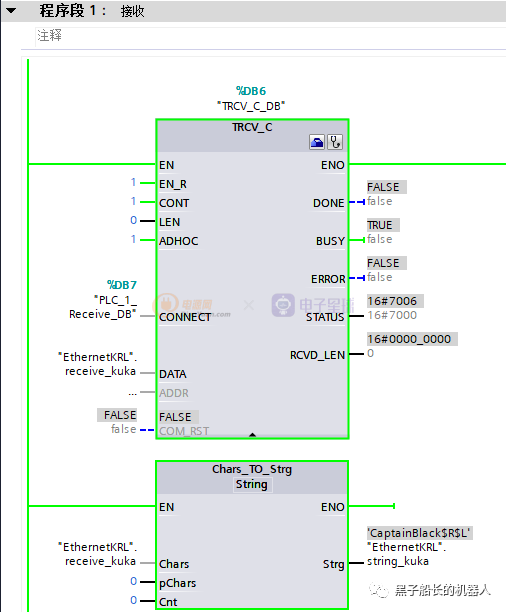
1、接收指令
2、發送指令

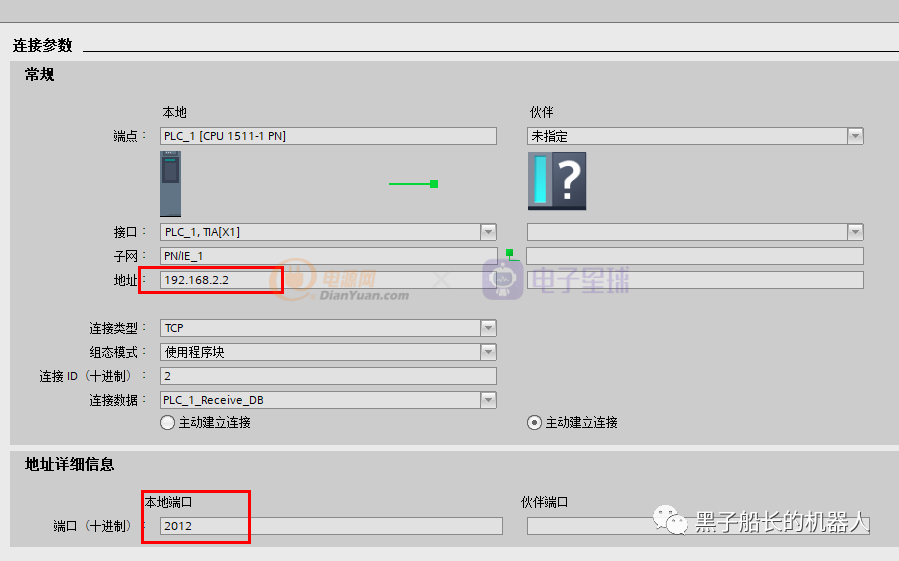
3、通訊配置
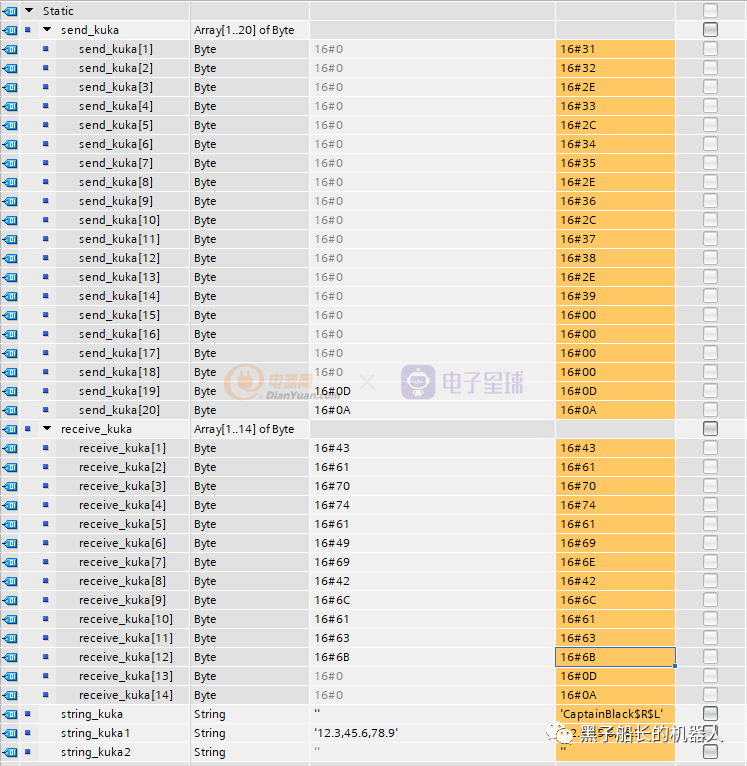
4、數據塊
5、S7-PLCSIM Advaced V3.0的設置參考“西門子仿真的PLC與RobotStudio 6.0 的仿真通訊”

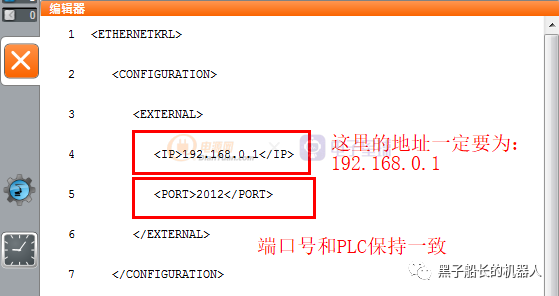
四、KUKA Officelite虛擬機示教器中的程序1、kuka router的設置,IP地址和端口號和PLC一致。

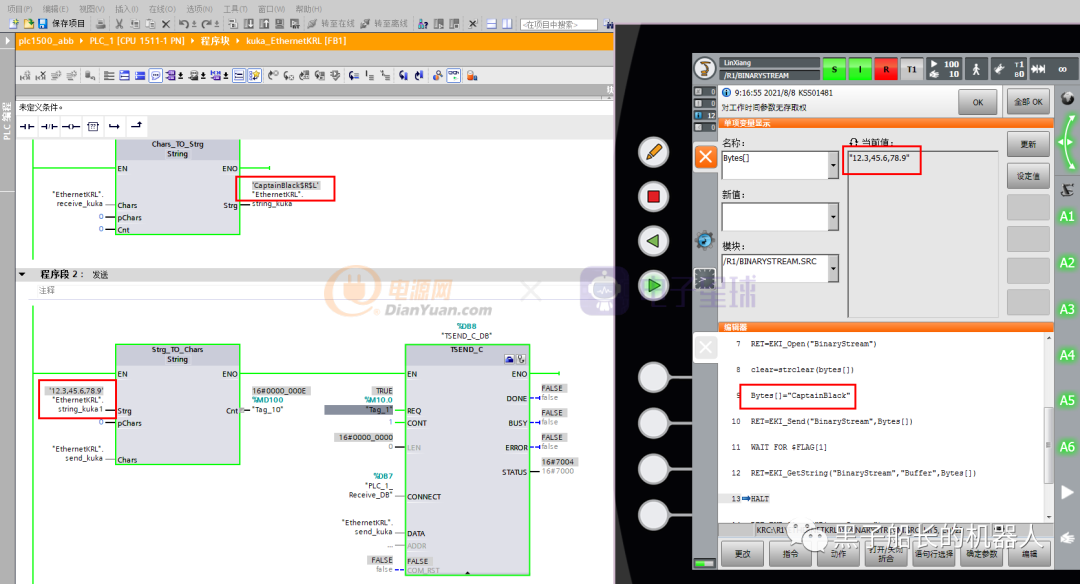
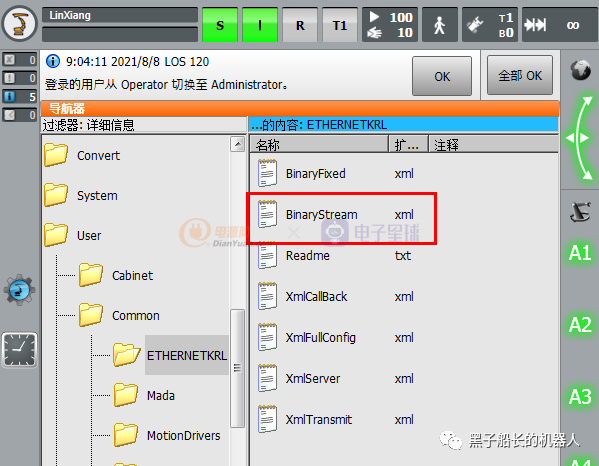
2、通訊XML文件的配置,使用的是默認的BinaryStream。
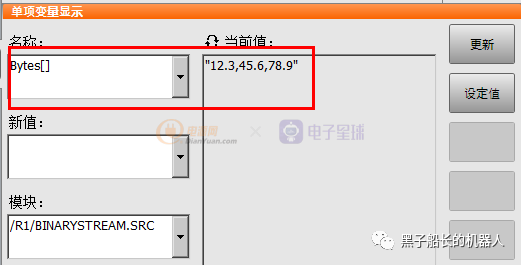
3、BinaryStream.src文件編程
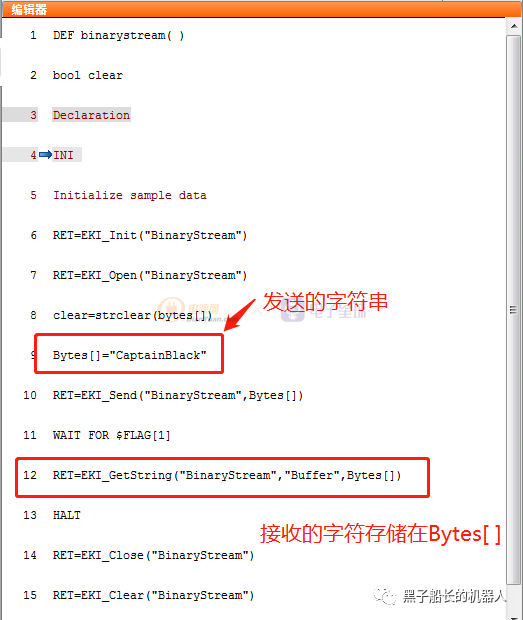
4、注意字符串的發送和接收有回車換行的標記符
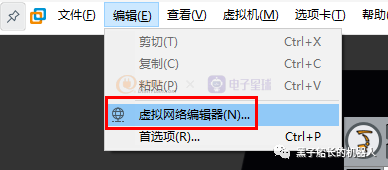
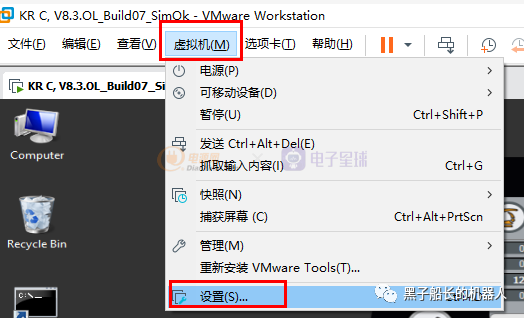
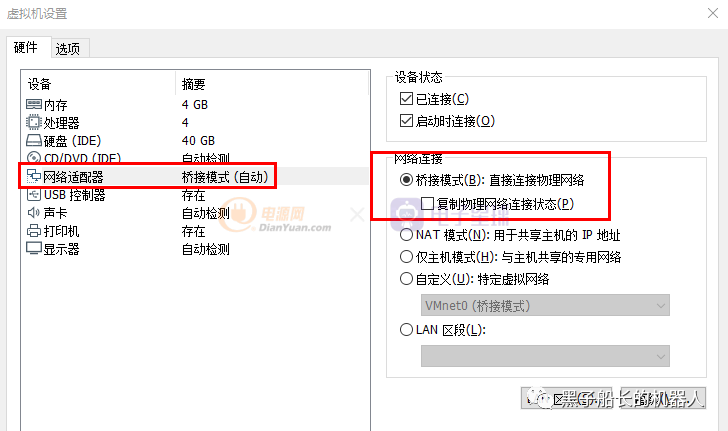
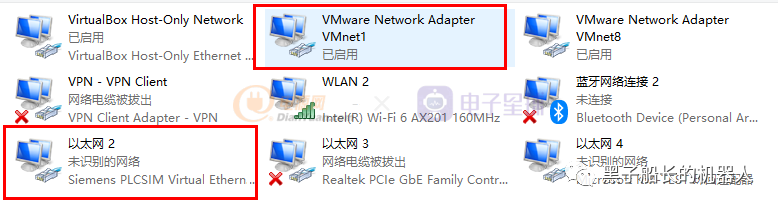
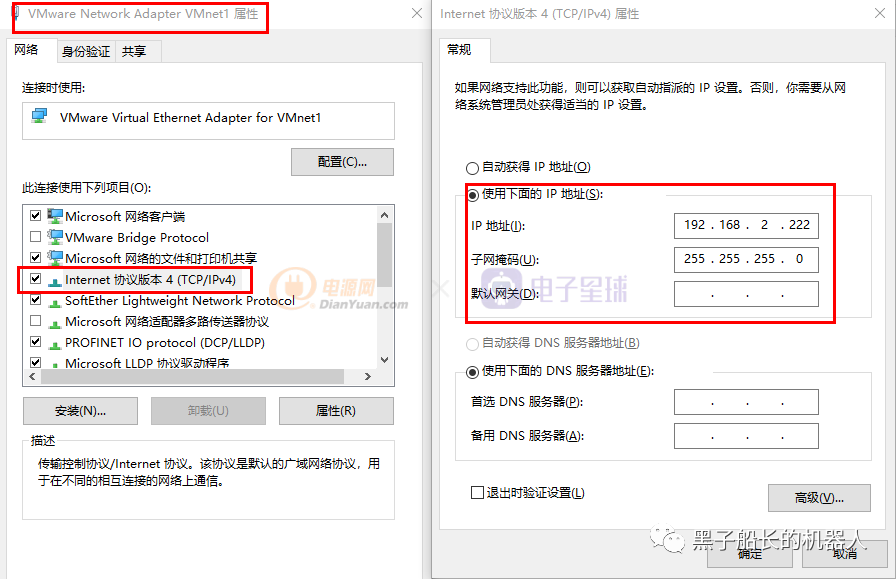
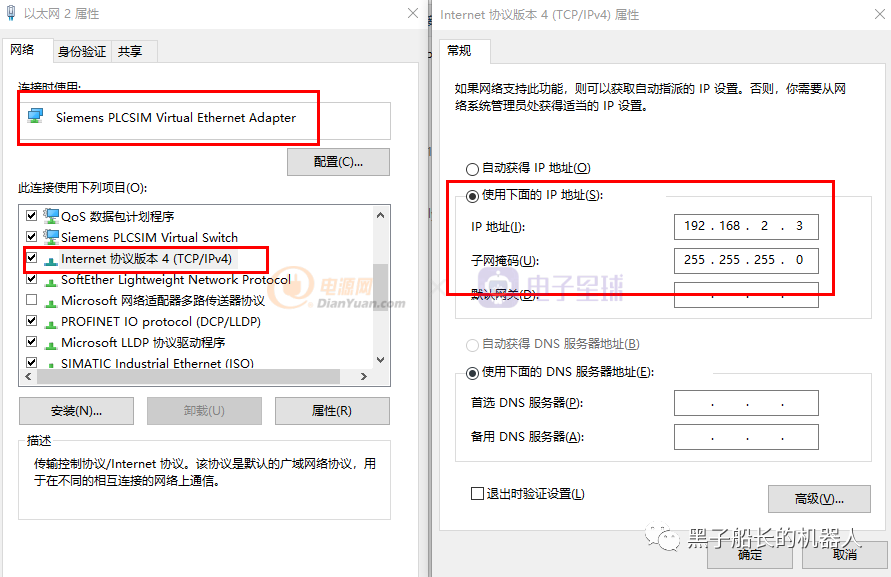
五、VMware虛擬機網路設置(很重要)
1、為了能使虛擬機和主機以及和S7-PLCSIM Advaced V3.0之間進行通訊,需要進行如下設置:
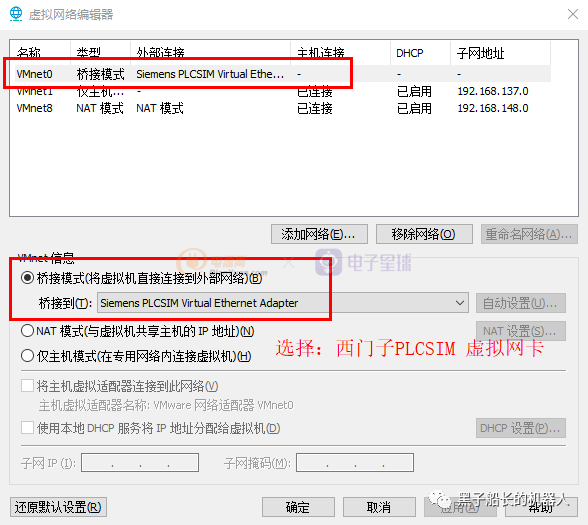
2、主機的各網卡的地址設定,保持和PLC的IP地址在同一網段內。
總結:大概步驟和流程比較簡單,僅供參考學習,如有不妥之處,還請各位指正。