

基本的反激變換器原理圖如下所示,在需要對輸入輸出進行電氣隔離的低功率<75W~的開關電源應用場合,反激變換器(Flyback Converter)是最常用的一種拓撲結構(Topology)。簡單、可靠、低成本、易于實現是反激變換器突出的優點。接下來我將電源的反饋控制環路部分的設計進行說明!

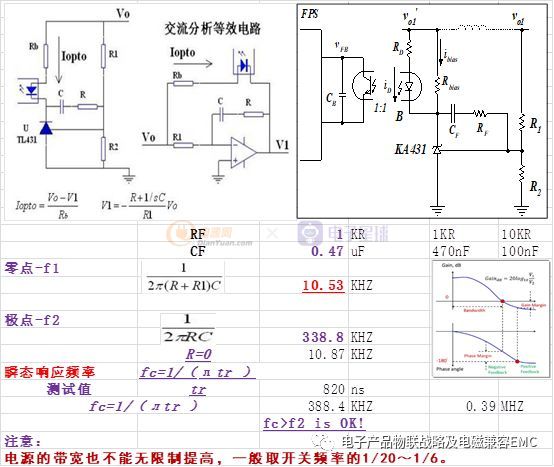
系統反饋環路的計算結果如下:

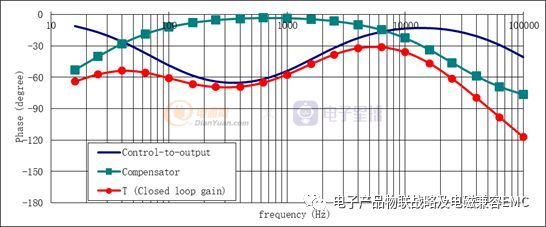
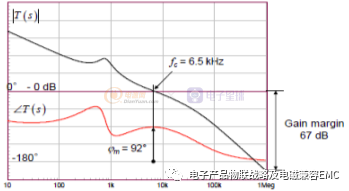
系統的閉環增益及相位請參考如下紅色曲線:

增益曲線
相位曲線
補償電路設計基本理論分析
開關電源系統是典型的閉環控制系統,設計時,補償電路的實踐與理論相當抽象需要建立模型。目前流行的反激IC控制器,絕大多數采用峰值電流控制控制模式。峰值電流模式反激的功率級小信號可以簡化為一階系統,所以它的補償電路容易設計。
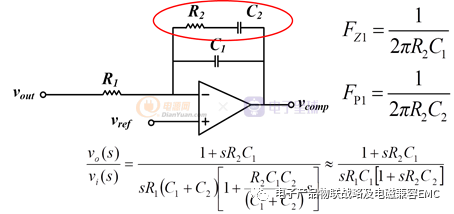
通常,使用Dean Venable提出的Type II 補償電路就足夠了。
Type II Compensation Circuits:


運用如下參數參考設計,通過上面方法;得出增益和相位曲線分析:

如下圖示:
Ø Band width:30kHz
Ø Phase Margin:
-155+180 = 25 degree


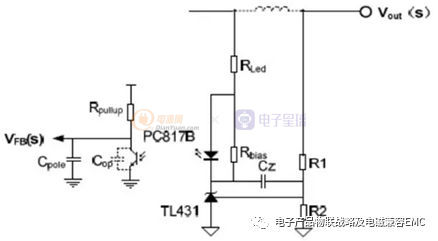
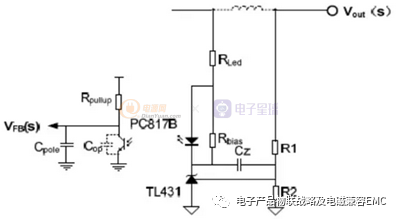
反激變換器的反饋回路圖示
在設計補償電路之前,首先需要考察補償對象(功率級)的小信號特性。
如上圖所示,從IC 內部比較器的反相端斷開,則從控制到輸出的傳遞函數(即控制對象的傳遞函數)為:
我再將電源的反饋回路進行等效電路分析:
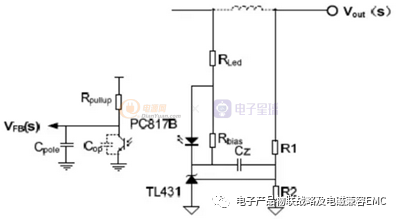


TR :為光耦的電流傳輸比
Rpullup: 為光耦次級側上拉電阻
Cop : 為光耦的寄生電容
實際設計中,建議L1 (輸出電感)不超過4.7μH。
上述的G(s)函數為標準函數
對CCM 模式反激,其控制到輸出的傳函為:

峰值電流模式的電流內環,本質上是一種數據采集系統,功率級傳函由兩部分Hp(s)和Hh(s)串聯組成,其中

Hh(s)為電流環電流采樣形成的二階采樣環節(由RayRidley 提出):

其中:

上式中,PO 為輸出總功率,k 為誤差放大器輸出信號到電流比較器輸入的衰減系數,Vout1 為反饋主路輸出電壓,Rs 為初級側檢流電阻,D 為變換器的占空比,n 為初級線圈NP與主路反饋線圈Ns1 的匝比,m 為初級電流上升斜率,ma為斜坡補償的補償斜率,Esr 為輸出電容的等效串聯電阻,Cout是輸出電容之和。
注意:CCM 模式反激變換器,從控制到輸出的傳函,由如下公式 :

可知,有一個右半平面零點,它在提升幅值的同時,帶來了90°的相位衰減,這個零點不是我們想要的,設計時應保證帶寬頻率不超過右半平面零點頻率的1/3;由如下公式:

可知,如果不加斜坡補償(ma=0),當占空比超過50%時,電流環震蕩,表現為驅動大小波,即次諧波震蕩。因此,設計CCM 模式反激變換器時,需加斜坡補償。
對DCM 模式反激,控制到輸出的傳函為:

其中:

Vout1為主路輸出直流電壓,k 為誤差放大器輸出信號到電流比較器輸入的衰減系數,m為初級電流上升斜率,ma 為斜坡補償的補償斜率,Idspeak 為給定條件下初級峰值電流。


CTR :為光耦的電流傳輸比
Rpullup: 為光耦次級側上拉電阻
Cop : 為光耦的寄生電容
實際設計中,建議L1 (輸出電感)不超過4.7μH。
上述的G(s)函數為標準函數
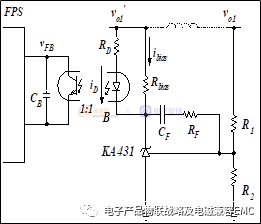
通常,為降低輸出紋波噪聲,輸出端會加一個小型的LC 濾波器,如上圖
所示,L、C 構成的二階低通濾波器會影響到環路的穩定性,L、C 的引入,使變換器的環路分析變得復雜,不但影響功率級傳函特性,還會影響補償網絡的傳函特性。然而,建模分析后可知:如果L、C 的轉折頻率大于帶寬fcross 的5 倍以上,那么其對環路的影響可以忽略不計,實際設計中,建議L不超4.7μH。
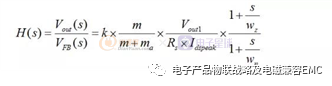
于是我們簡化分析時,直接將L1直接短路即可,推導該補償網絡的傳遞函數G(s)為:

其中:

CTR為光耦的電流傳輸比,Rpullup 為光耦次級側上拉電阻(對應控制IC,Rpullup=IC的內部電阻)如下圖所示:

Cop為光耦的寄生電容,與Rpullup=IC內部的Bias 的大小有關。下圖(來源于PC817 的數據手冊)是光耦的頻率響應特性,可以看出,當RL(即Rpullup)為內部參數時,將會帶來一個約10.53KHz左右的極點,所以Rpullup=內部R-Bias的大小會直接影響到變換器的帶寬。
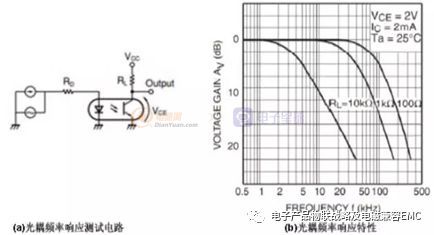
光耦的頻率響應
如下計算:

R1與CF 形成了在原點當中的極點,被用來對低頻增益進行提升,來壓制低頻(100Hz)紋波和提高輸出調整率,即靜態誤差。RF&CF 形成一個零點,來提升相位,要放在帶寬頻率的前面來增加相位裕度,具體位置要看其余功率部分再設計帶寬處的相位是多少,RFCF 的頻率越低,其提升的相位越高,當然最大只有90 度,但其頻率很低時低頻增益也會減低,一般放在帶寬的1/5 處,約提升相位78 度。
(1) 相位裕度是指:增益降到0dB時所對應的相位。
(2) 增益裕度是指:相位為0deg時所對應的增益大小(實際是衰減)。
(3) 穿越頻率是指:增益為0dB時所對應的頻率值。
穿越頻率,又稱為頻帶寬度,頻帶寬度的大小可以反映控制環路響應的快慢。
一般認為帶寬越寬,其對負載動態響應的抑制能力就越好,恢復時間也就越快,系統從而可以更穩定;缺點是寬的帶寬也會帶來更多噪聲的問題。同時是由于受到右半平面零點的影響,以及原材料、運放的帶寬不可能無窮大等綜合因素的限制;需要合理化設計!
k Factor(k 因子法)確定補償網絡參數:
★k Factor(k 因子法)是DeanVenable 在20 世紀80 年代提出來的,提供了一種確定補償網絡參數的方法。
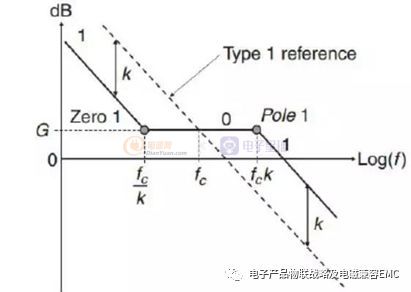
采用K因子確定零點和極點的位置

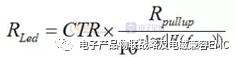
如上圖K因子及補償參數圖所示,將Type II 補償網絡的極點wp 放到fcross的k 倍處,將零點wz 放到fcross的1/k 處。上面的補償反饋的補償網絡有三個參數需要計算:RLed,Cz,Cpole,下面將用k Factor 計算這些參數:

動態負載時輸出電壓波形
由此通過上面的假設參數進行理論數據推導如下:
-----確定補償后的環路帶寬fcross:通過限制動態負載時(△Iout)的輸出電壓過沖量(或下沖量)△Vout,由下式決定環路帶寬:

--考察功率級的傳函特性,確定補償網絡的中頻帶增益(Mid-band Gain):
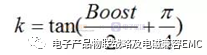
--確定Dean Venable 因子k:
選擇補償后的相位裕量PM(一般取35°~80°),由如下公式

得到fcross 處功率級的相移(可由Mathcad 計算)PS,則補償網絡需要提升的相位Boost 為:

推薦PM=70 PS=-100
則k 由下式決定:

--補償網絡極點(wp)放置于fcross 的k 倍處,可由下式計算出Cpole:

--補償網絡零點(wz)放置于fcross 的1/k 倍處,可由下式計算出Cz:


通過設計經驗推薦K=3--4; PM=70 PS=-100進行取值K=3.24
因此如下原理圖參數均可全部設計確定下來:
總結:一般可從以下三個原則判定電源環路穩定性:
(1)、在室溫和標準輸入、正常負載條件下,閉環回路增益為0dB(無增益)的情況下,相位裕度是應大于45 度;
如果輸入電壓、負載、溫度變化范圍非常大, 相位裕度不應小于30度。
(2)、同步檢查在相位接近于0deg時,閉環回路增益裕度應大于7dB,為了不接近不穩定點,一般認為增益裕度12dB以上是必要的。
(3)、同時依據測試的波特圖對電源特性進行分析,穿越頻率按20dB/Dec閉合,頻帶寬度一般為開關頻率的1/20~1/6。

零極點頻率引起的增益斜率變化規則




開關電源系統瞬態負載條件下的幾種典型響應波形可供 設計參考!
通過上面的理論和實踐的運用,我們的設計參數一般會按IC-DS推薦的參數進行設計;其設計結果不會有太大的問題;但對于我們想了解我們參數的最佳值我還是推薦儀器測試法來實際測量-讓系統有最佳的系統穩定性設計。

電源環路及系統的穩定性評估分析工具(強烈推薦)
運用我制作的測試工具板來驗證系統環路的穩定性方法;我通過MOS的開關來增加系統的輸出電流;來測試瞬態輸出變化電流和輸出電壓的變化情況;來分析系統在不同負載條件下的環路的穩定性
(讓系統有最佳的增益和相位裕度設計!)

CH-綠色:輸出電流的波形 CH-藍色輸出電壓波形
說明:
MOS的響應時間500nS 固定負載初值:為負載的10%
可以再外加10%-100% 動態MOS控制負載為>10%
MOSON的時間為 5%的Duty 導通時間(防止MOS串聯的電阻長時間發熱)

該穩定性評估分析工具:由MCU驅動高速MOS組成,MOS的響應時間<500nS
說明:用MCU 來做PWM驅動,5%Duty mos開通時間,6V驅動(電池供電)頻率可選!便于隨身攜帶;不需要外部的交流電源系統!@!
注意:MOS-ON的時間=5% * T
F-drv=100HZ T=10mS MOS-Ton=0.5ms=500us
F-drv=200HZ T=5mS MOS-Ton=0.25ms=250us
F-drv=300HZ T=3.3mS MOS-Ton=0.167ms=167us
F-drv=500HZ T=2mS MOS-Ton=0.1ms=100us
F-drv=1KHZ T=1mS MOS-Ton=0.05ms=50us
這個評估板的設計,MOS/F-Drv頻率由撥碼開關組合選擇,MOS/ON的時間也可以由撥碼開關組合選擇;適合所有拓撲結構方案的環路設計評估!
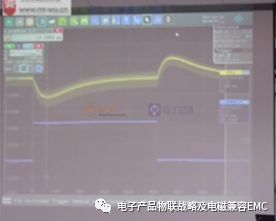
測試非常好的波形分析評估如下:(優化反饋系統參數及光耦參數即可)
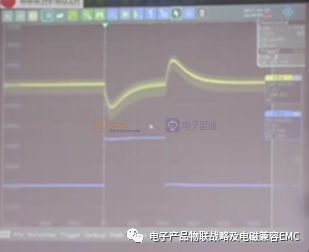
瞬態的響應頻率F=1/(лTr)=0.3/Tr
測試圖中的瞬態時間(高點到低點的時間)=23uS
F=1/(лTr)=0.3/Tr=0.3/23us=13KHZ
電源的補償(COMP)計算零點時的頻率
f=1/(2ЛR*C)
f < F的頻率 系統就OK啦;實際測試如下圖的理論計算數據相一致!
