作者:Franco Contadini,主管工程師
摘要
電源管理集成電路(PMIC)有益于簡化最終應用并縮小其尺寸,也因此備受青睞。然而,當默認啟動時序和輸出電壓與應用要求不符時,就需要定制上電設置。大多數情況下,電路沒有可以存儲這些設置的非易失性存儲器(NVM)。對此,低功耗微控制器是一個很好的解決方案,其功能特性和所包含的工具可以在上電時對PMIC控制寄存器進行編程,而不需要開發固件。本文將探討如何使用工具鏈來解決集成難題。該工具鏈無需開發固件,能夠簡化PMIC的定制過程,并顯著縮短開發周期。
簡介
為了減小手持設備、智能相機和其他便攜式設備的尺寸并降低成本,設計時需使用高度集成且功能強大的器件。MAX77714是一款高度集成的PMIC,包含多個降壓轉換器、低壓差(LDO)穩壓器、通用輸入輸出(GPIO)和實時時鐘(RTC),可用于生成應用所需的所有電源軌。
靈活的時序控制器支持針對目標應用定制上電和關斷時序。
這款PMIC提供的幾種VOUT/時序控制器選項(由完整產品型號定義)不符合應用要求。為了提高靈活性,可以使用低功耗微控制器作為替代解決方案。該器件可以在上電時喚醒,對器件寄存器進行編程,然后休眠以節省電力。
要求高集成度的中等規模應用需要采用現成器件的簡單解決方案,并根據需求定制操作。
硬件設計人員一直希望能夠擁有可以自動生成固件代碼的工具,讓他們可以在前期開發時避免涉及軟件資源,同時還能優化資源的使用。
MAX28200
MAX28200是一款低功耗、小尺寸(1.7 mm × 1.8 mm)RISC微控制器,帶有多種外設。對于此應用,我們使用兩個GPIO引腳作為位觸發I2C主機。
電源電壓最高為3.6 V,因此如果輸入電壓超過3.6 V,則使用始終開啟的LDO穩壓器為微控制器供電。該器件可以通過I2C節點接口進行編程。
MAX77714
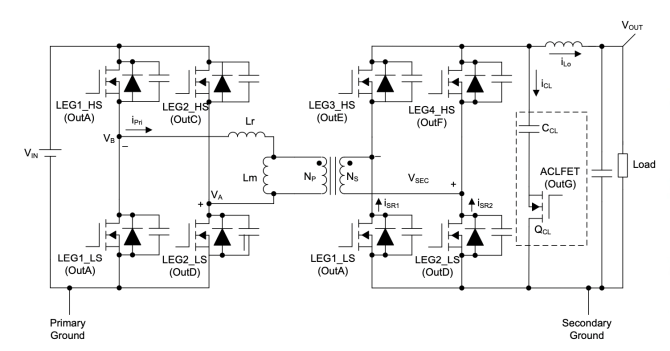
MAX77714(圖1)是一款高度集成的PMIC,包含四個降壓轉換器、九個LDO穩壓器、八個GPIO、一個RTC和一個靈活的電源時序控制器(FPS)。降壓轉換器和LDO穩壓器按照默認時序和電壓上電,并遵循電壓軌規范。用戶可以通過I2C嵌入式接口進行修改。然而,在大多數情況下,我們需確保默認時序和電壓與連接到PMIC的器件的要求相匹配;如果電壓超過其最大額定值,器件可能會損壞。
上電和關斷時序也很重要,因為現場可編程門陣列(FPGA)等器件為了正常運行,需要按照正確的時序使能和禁用電壓。圖2為默認上電時序。共有八個時隙,電壓可以在任意一個時隙中使能。該器件可以由高達5.5 V的電壓供電。

圖1.MAX77714簡化功能框圖。

圖2.MAX77714EWC+默認上電時序。
器件接口
P0.0和P0.1用于生成針對PMIC的I2C事務;P0.2負責監控GPIO4的狀態;P0.3利用SPDT開關選擇I2C主機(MAX28200或主機微控制器)。模擬開關是選配項,僅在主機微控制器需在上電后控制PMIC時才需要配置(見圖3)。

圖3.MAX28200和MAX77714與MAX14689和ADP166連接。
上電復位(POR)如圖4所示:
1.P0.3置為低電平,選擇該器件作為PMIC的I2C主機。
2.寫入以下所需的數據寄存器。
3.P0.3置為高電平,選擇主機微控制器作為I2C主機,該器件進入休眠模式。
4.P0.2連接到GPIO4,用于在關斷時喚醒器件并對寄存器重新編程。
請注意,在配置結束時,必須將GPIO4置為高電平。
一旦使用EN0和EN1信號使能PMIC,它就會以新的時序/電壓配置上電。

圖4.MAX28200程序流程。
MAX77714上電和關斷時序由此處提供的MAX77714 GUI定義。
使用“GUI導入/導出”選項卡,可以將寄存器值導出為Excel文件。
在展示如何使用GUI EVKIT之前,我們需要先知道哪些寄存器對于定制啟動很重要。
MAX77714寄存器詳細信息
降壓轉換器
每個降壓轉換器實例都有三個相關寄存器(SDx_CNFG1、SDx_CNFG2和SDx_CNFG3),用于定義啟動電壓、斜坡速率和工作模式。
CNFG1用于設置輸出電壓,7位至8位位域如下:
VSD0 = 0.26 V + ((SD0VOUT[6:0] - 1) × 10 mV) à范圍為0.26 V到1.56 V
VSD1 = 0.26 V + ((SD1VOUT[6:0] - 1) × 10 mV) à范圍為0.26 V到1.56 V
VSD2 = 0.6 V + (SD2VOUT[7:0] × 6.25 mV) à范圍為0.6 V到2.194 V
VSD3 = 0.6 V + (SD3VOUT[7:0] × 12.5 mV) à范圍為0.6 V到3.7875 V
CNFG2和CNFG3寄存器用于選擇斜坡速率(2.5 mV/μs或10 mV/μs)、使能/禁用主動放電、使能/禁用跳頻模式、選擇響應時間和過壓閾值。
LDO電壓調節器
每個LDO穩壓器實例都有兩個相關寄存器(LDO_CNFG1_Lx和LDO_CNFG2_Lx)。
CNFG1設置輸出電壓:
LDO0和LDO1為0.8 V至2.375 V。
VLDO = 0.8 V + (VOUT_LDO[5:0] × 25 mV)
LDO2、LDO3、LDO5、LDO6、LDO7、LDO8為0.8 V至3.95 V
VLDO = 0.8 V + (VOUT_LDO[5:0] × 50 mV)
LDO4為0.4 V至1.275 V
VLDO = 0.4 V + (VOUT_LDO[5:0] × 12.5 mV)
CNFG2用于使能/禁用過壓箝位、使能/禁用自動低功耗模式、使能/禁用主動放電、選擇快速/慢速啟動。
GPIO
每個GPIO實例都有一個相關寄存器CNFG_GPIOx,該器件負責選擇方向GPO/GPI、輸出類型(開漏/推挽)和輸出驅動電平(若為GPO),以及輸入驅動電平、中斷行為和去抖動配置(若為GPI)。
FPS
時序由xxxFPS寄存器定義,LDO0FPS至LDO8FPS用于線性穩壓器,SD0FPS至SD3FPS用于降壓轉換器,GPIO0FPS、GPIO1FPS、GPIO2FPS、GPIO7FPS用于GPIO,RSTIOFPS用于復位。
FPS[2:0]用于設置關斷時隙(SLOT0至SLOT7)
FPS[5:3]用于設置上電時隙(SLOT0至SLOT7)
FPS[7:6]用于設置分配的時序控制器(FPS0、FPS1)
FPS0由EN0使能,FPS1由EN1使能
上電和關斷時隙的大小可以利用MSTR_PU_PD寄存器指定:
MSTR_PU_PD[2:0]用于指定關斷時隙,MSTR_PU_PD[6:4]用于指定上電時隙
可能的步長為:31 μs、63 μs、127 μs、253 μs、508 μs、984 μs、1936 μs、3904 μs,MAX77714EWC+的默認值為3904 μs。
GUI實際應用
在圖5中,已利用GUI將SD0的輸出電壓修改為0.7 V。

圖5.用于修改SD0電壓的GUI。
SD0上電和關斷時序已修改為時隙2(圖6)。

圖6.用于修改SDO時隙號的GUI。
GPIO4已配置為推挽輸出,驅動電平為高電平(圖7)。

圖7.用于配置GPIO4的GUI。
最后,使用“導入/導出”選項卡將修改后的寄存器值導出為Excel文件(圖8)。

圖8.用于導出寄存器值的GUI。
以下是生成的.csv文件(圖9)。

圖9.MAX77714 .csv文件的格式。
請注意,如果必須在上電期間對連接到I2C的其他器件進行編程,用戶可以使用相同格式將其他命令附加到.csv文件。
從.csv文件創建I2C主機固件
您可以點擊此處獲取MAX28200 GUI,按照以下步驟可對器件進行編程:
1.從.csv文件構建.hex文件(圖10)。
2.對器件進行編程(圖11和圖12)。

圖10.從原始.csv文件構建.hex文件。

圖11.使用選定腳本對器件進行編程。

圖12.使用數據模式對器件進行編程。
對建議解決方案進行測試
一旦在上電時使用MAX77714.hex進行編程,P0.3就會置為低電平,以將MAX77714 I2C線連接到MAX28200,并使用新值對SD0和GPIO4寄存器進行編程(圖13)。

圖13.MAX77714 SD0和GPIO4寄存器已用新值進行編程。
現在,當MAX77714使能時,EN0置為高電平,SD0將按照編程設定,以0.7 V在時隙2上電。圖14為寄存器寫入之前上電(a)和寄存器寫入之后上電(b)的情況。

圖14.SDO在寄存器寫入之前和之后上電。(a)寄存器寫入之前上電。(b)寄存器寫入之后上電。
結論
MAX28200是一款頗具吸引力的微控制器解決方案,能夠為PMIC提供上電設置。此過程可以使用工具來自動執行,無需設計人員編寫任何代碼。對于不熟悉軟件的硬件設計人員來說,這是一個非常方便的解決方案。微控制器就像黑匣子一樣,工作時無需固件設計人員參與。設計人員可以使用針對特定應用定制的現成器件來達到集成目標。
關于ADI公司
Analog Devices, Inc. (NASDAQ: ADI)是全球領先的半導體公司,致力于在現實世界與數字世界之間架起橋梁,以實現智能邊緣領域的突破性創新。ADI提供結合模擬、數字和軟件技術的解決方案,推動數字化工廠、汽車和數字醫療等領域的持續發展,應對氣候變化挑戰,并建立人與世界萬物的可靠互聯。ADI公司2024財年收入超過90億美元,全球員工約2.4萬人。ADI助力創新者不斷超越一切可能。更多信息,請訪問www.analog.com/cn。
作者簡介
Franco Contadini擁有超過35年的電子行業從業經驗。在從事電路板和ASIC設計工作10年之后,他成為現場應用工程師,為工業、電信和醫療客戶提供支持,主要負責電源和電池管理、信號鏈、加密系統和微控制器等相關業務。Franco撰寫
聲明:本內容為作者獨立觀點,不代表電源網。本網站原創內容,如需轉載,請注明出處;本網站轉載的內容(文章、圖片、視頻)等資料版權歸原作者所有。如我們采用了您不宜公開的文章或圖片,未能及時和您確認,避免給雙方造成不必要的經濟損失,請電郵聯系我們,以便迅速采取適當處理措施;歡迎投稿,郵箱∶editor@netbroad.com。
| ADI TMC5240 步進電機驅動實戰 (例程) 分享 | 25-06-30 16:49 |
|---|---|
| 16 V、8 A Silent Switcher μModule穩壓器如何成為低噪聲應用的理想之選 | 25-06-24 16:01 |
| 輕松完成控制回路仿真 | 25-06-23 15:40 |
| 為敏感的器件打造超低噪聲電源 | 25-06-16 15:18 |
| 未來數字化工廠:重塑制造業格局 | 25-06-12 11:14 |
| 微信關注 | ||
 |
| 技術專題 | 更多>> | |
 |
| 技術專題之EMC |
 |
| 技術專題之PCB |

| 電子行業原創技術內容推薦 | |
 |

互聯網違法不良信息舉報
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006