隨著電力行業的快速發展,逆變器的應用越來越廣泛,逆變器的好壞會直接影響整個系統的逆變性能和帶載能力。逆變器的控制目標是提高逆變器輸出電壓的穩態和動態性能,穩態性能主要是指輸出電壓的穩態精度和提高帶不平衡負載的能力;動態性能主要是指輸出電壓的THD(Total Hannonic Distortion)和負載突變時的動態響應水平。在這些指標中對輸出電壓的THD要求比較高,對于三相逆變器,一般要求阻性負載滿載時THD小于2%,非線性滿載(整流性負載)的THD小于5%.這些指標與逆變器的控制策略息息相關。文中主要介紹如何建立電壓雙環SPWM逆變器的數學模型,并采用電壓有效值外環和電壓瞬時值內環進行控制。針對UPS單模塊10 kVA單相電壓型SPWM逆變器進行建模仿真。通過仿真,驗證了控制思路的正確性以及存該控制策略下的逆變器所具有的魯棒性強,動態響應快,THD低等優點。并以仿真為先導,將其思想移植到具體開發中,達到預期效果。
1 三電平逆變器單相控制模型的建立
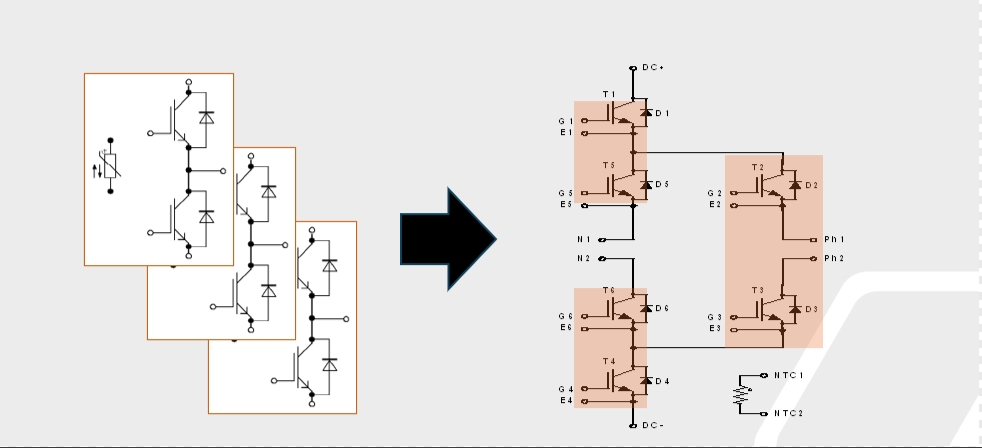
帶LC濾波器的單相逆變器的主電路結構如圖1所示。圖1中L為輸出濾波電感,C為濾波電容,T1,T2,T3,T4分別是用來驅動IGBT的三電平的SPWM波,U0為輸出負載兩端的電壓。在建立控制系統的仿真模型時,需要采集負載兩端的電壓與實際要求的電樂值做比較,然后通過調節器可以得到所需要調節的值。在此仿真模型中,驅動波形采用的是三電平的SPWM波形,具體的產生原理在這不做詳細描述。在Matlah的Simlink庫中SPWM波的產生如圖2所示,這里調制比設為0.8。
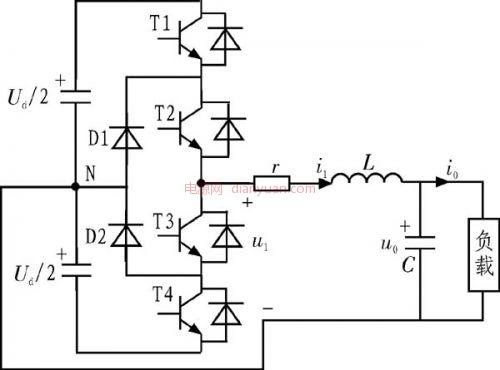
圖1 三電平逆變器單相主電路
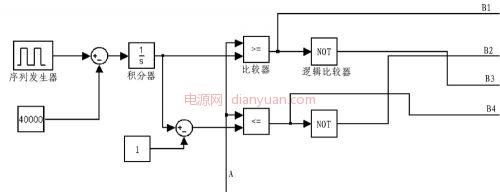
圖2 四相SPWM產生電路
在B1,B2,B3,B4端口用模擬示波器觀察其波形,結果如圖3所示。
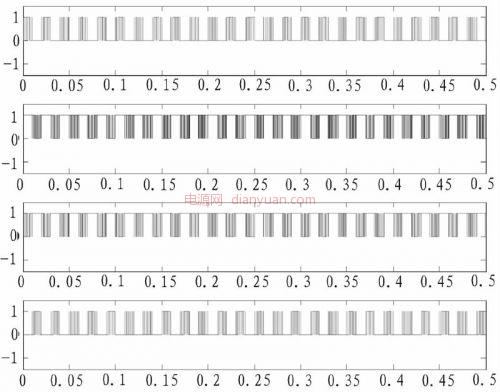
圖3 四相SPWM驅動波形
2 雙環控制的選取
在逆變控制系統中,采用輸出電壓有效值反饋的方法進行控制,這種方法通過將輸出電壓有效值與實際所要求的電壓有效值進行比較,誤差信號與正弦信號相乘的結果作為SPWM的調制信號。這種方法的輸出波形穩壓精度較高,穩定性好,但最大的缺陷在于逆變器的動態響應很差,完全依靠逆變器的自然特性,輸出電壓的波形質量無法控制。當負載為非線性負載時,由于逆變器輸出阻抗的影響,輸出電壓波形的THD比較大。為解決以上的缺陷,引入內環電壓瞬時環,當負載發生變化時,采樣回來的輸出電壓會在電壓瞬時環的控制下,保持良好的動態響應,控制框圖如圖4所示。
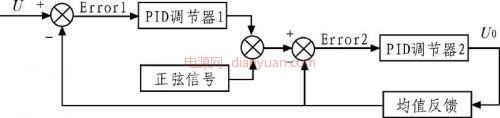
圖4 雙環控制框圖
在圖4中,輸入信號U為系統所要求的信號,U為系統輸出信號。本系統將PID調節器1設置為電壓瞬時值內環,將PID調節器2設置為電壓均值外環。
3 建立仿真模型
在Simulink下構建三電平逆變器的仿真模型,該模型主要由三電平的SPWM產生電路,主拓撲電路,控制電路和負載電路4部分組成。控制電路實現了電壓雙環控制,同時為SPWM脈沖提供調制信號,負載可以選擇阻性載或整流載。
3.1 建立主拓撲電路
首先來建立逆變器的主拓撲電路。根據圖1所示的電路原理,在Matlab環境下新建一個上程,然后存Simulink庫根據需要找出二極管和IGBT,連接電路圖便可得到如圖5所示的單相逆變器的主拓撲仿真模型。
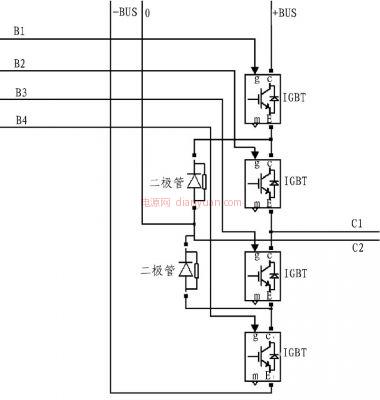
圖5 單相逆變器主拓撲結構圖
其中,B1、B2、B3、B4分別代表四相SPWM波形驅動波形,+BUS、0分別表示圖1中的Ud/2和N,C1和C2之間的電壓即位圖1中的U1。
3.2 負載電路建模
負載分為阻性載和整流載,為了更好的驗證PID調節器的性能,在此假定整流載和阻性載同時存在,然后中間用開關來控制所帶的負載特性。負載建模如圖6所示。
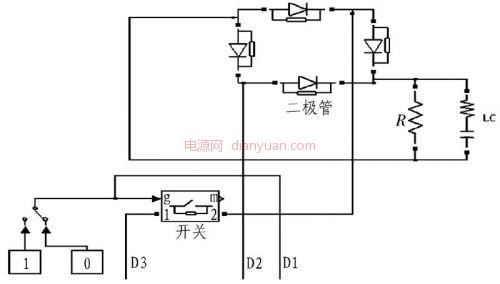
圖6 負載(阻性載和整流載可選)
當手動開關位于1時,負載特性為整流載。反之,當手動開關位于0時,負載特性為阻性載。圖6中,D1為開關信號,D2、D3為連接到輸出端的連接端口。
3.3 閉環控制電路以及輸出電路建模
閉環控制電路的模型如圖7所示。圖7中;模擬示波器1中的1端口為輸出端C1和C2未經過電容濾波而得到的輸出電壓,2端口為輸出端C1和C2經過電容濾波后得到的輸出電壓,3端口為輸出電壓經過一個增益器之后所得到的對應的輸出電壓,4端口為系統輸出電流,5端口為控制負載特性選擇的開關信號。仿真波形如圖8所示。
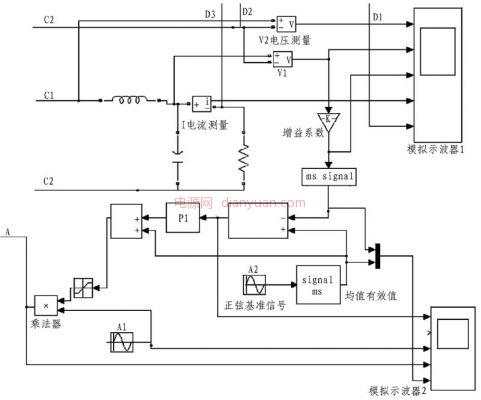
圖7 閉環控制電路
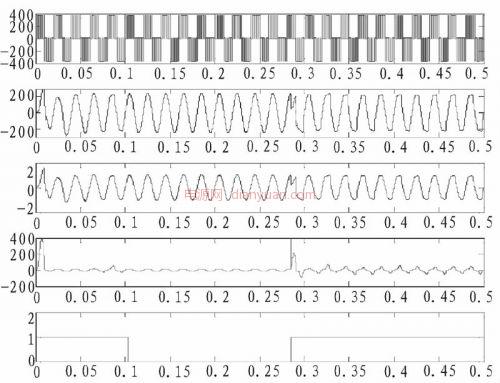
圖8 輸出端口電壓仿真波形
根據圖4提出的控制策略,輸出電壓經過一個均值器之后與系統所要求得到的信號進行比較,比較后的差值經過PID調節(電壓瞬時內環調節),同理,可以建立電壓均值外環控制模型。
在上述模擬示波器2中,1端口為第一次PID調節器之前的差值Errorl,仿真波形如圖9所示。
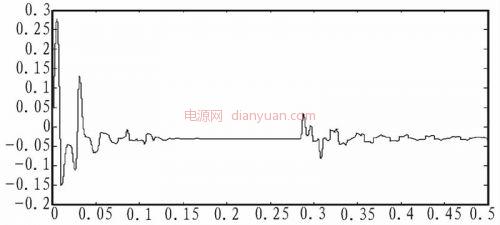
圖9 經過PID調節器之前的差值信息波形
通過圖8,可以很明顯的看到,當負載特性發生變化時,電流波形和輸出電壓波形會發生明顯的變化。當負載為阻性載時,輸出電壓電流均為正弦信號。當負載為整流載時,輸出電壓電流信號出現一定的失真。
如圖9所示,在最開始進入調節器時,輸出電壓與實際要求的電壓差值很大,但在閉環中,經過PID的多次調節之后,可以很清楚的看到最后兩者之間的差值穩定趨近于0.從開始到最后趨近于0的整個動態過程反應了PID調節器的調節快慢,穩定等參數,從上圖可以清楚的看出此調節器的魯棒性強,動態響應快。
4 將建模思想移植到實際電路中
建模的目的主要是為了驗證設計的方案是否可行,如果可行,便可以設計硬件電路來實現此方案,可以花最少的代價來完成控制器的設計。
硬件平臺:DSP2812+10K高頻UPS模塊
根據實際經驗修改PID的參數,使輸出能夠在最快最穩的情況下達到預定值。
通過實際的調試,瞬時環中:P=0.6,I=0.04,均值環中,P=0.3,I=0.072,D=0.001.此時系統穩定,實際的輸出波形如圖10所示。
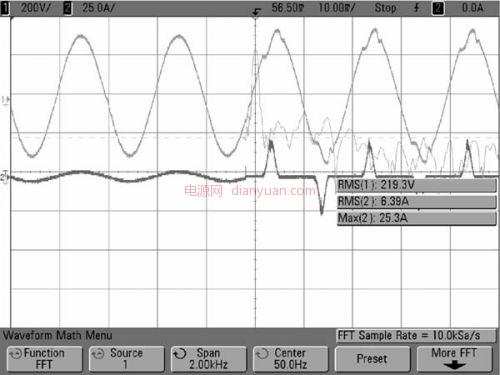
圖10 實際電路中輸出電壓與電流信號
實際要求輸出電壓為220V,負載采用的是整流載。上圖是阻性載往整流載切換時的輸出電壓與輸出電流波形圖。
從圖中,可以看出,此PID控制器能夠快速穩定的將輸出電壓值穩定在實際所要求的200V左右,說明了此調節器動態響應快,有交強的魯棒性。
5 結束語
PID調節器是逆變器中不可或缺的部分,PID調節器的好壞直接影響到逆變器的輸出性能和帶載能力。文中構建了10 KVA的單相SPWM逆變器的Simulink模型,負載采用純阻性載和整流載分別進行仿真。仿真結果表明,在不同的負載情況下,該控制器魯棒性強,動態響應快,輸出電壓總諧波畸變低。將此建模思想移植到10 K模塊化單相UPS電源上,控制精度和準度,均能達到預期的效果。
聲明:本內容為作者獨立觀點,不代表電源網。本網站原創內容,如需轉載,請注明出處;本網站轉載的內容(文章、圖片、視頻)等資料版權歸原作者所有。如我們采用了您不宜公開的文章或圖片,未能及時和您確認,避免給雙方造成不必要的經濟損失,請電郵聯系我們,以便迅速采取適當處理措施;歡迎投稿,郵箱∶editor@netbroad.com。
| 微信關注 | ||
 |
| 技術專題 | 更多>> | |
 |
| 技術專題之EMC |
 |
| 技術專題之PCB |




| 電子行業原創技術內容推薦 | |
 |

互聯網違法不良信息舉報
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006